�@�@�@�@�`���A���f���^���ւ̒���
2018.1��.�f��
| �@�@�@�@No.6�S |
|
�t
���͔����� �@�@�@�@�`���A���f���^���ւ̒��� |
2018.1��.�f�� |
�������� �������j���@ �@ �O �̎�����
�t���͂�����������
���L���̖͂@���C�N�[�����̖@���C ���C�̃N�[�����̖@���͂�����������̓��ɔ���Ⴗ��́A�t���͂Ƃ����_�ŋ��ʂ��Ă��܂��B ���̂ɋt�Q��͂��͂��炭�悤�ȑ��u�����ۂɍ�邱�Ƃ��o�����,�ڂ̑O�Řf���^���̂悤�ȑȉ~�^��������ł��傤�B ���낢�뎑�����������܂������A �����������u�͉ߋ��ɒN�������������Ƃ������悤�ł��B
 |
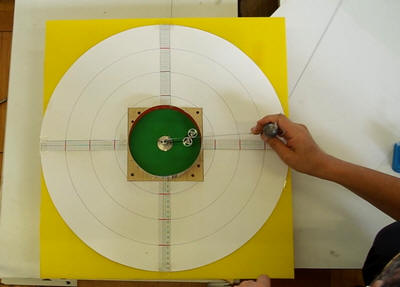
�@�� �S����̋����̓��ɔ�Ⴕ�����S�͂�������ɂ�����悤�ȑ��u���쐻���܂����B ���̓X�g���{�ʐ^�ł͂Ȃ��A�B�e�������悩��15�� ��1�b �Ԋu�i2�R �}���j�łP�����o���C ���� �r�Ŏ��������������̂ł��B ������ ��P50g�̋��`�̏d����Q�d�˂����̂�V�䂩�玅�Œ݂邵�A������������S�ֈ����Ă��܂��B �Q�̉��d��̏d�Ȃ�����ω����Ă���̂́C �J�����̈ʒu�����S�̐^�ォ�班���O��Ă��邽�߂ł��B �� �ʂƂ��āC�O���͕����ȉ~�ƂȂ��Ă��܂��B �����������Ƃ���肽�������̂ł��B |
|
�Ȋw�قł͌��邱�Ƃ��ł��Ȃ�
��͂�ɒ݂���@�� �����ŁA�������̓V�䂩��d���
���Œ݂��āA���S�ʒu���玅�ŏd����������Ƃɂ��܂����B �����C����������ɂ́A��Ԏ����葁�����@�ł��B���ݎ��̖��_��
�݂莅�̒������L���i������V��܂�2.6m�Ă��ǁj
�Ȃ̂ŁA�d�肪���S�ʒu���痣���قǁA�d�͂ɂ��ʒu�G�l���M�[�������Ă��܂����Ƃł��B���̃G�l���M�[������ł������悤�ɒ��S�͂����K�v������܂��B
�@
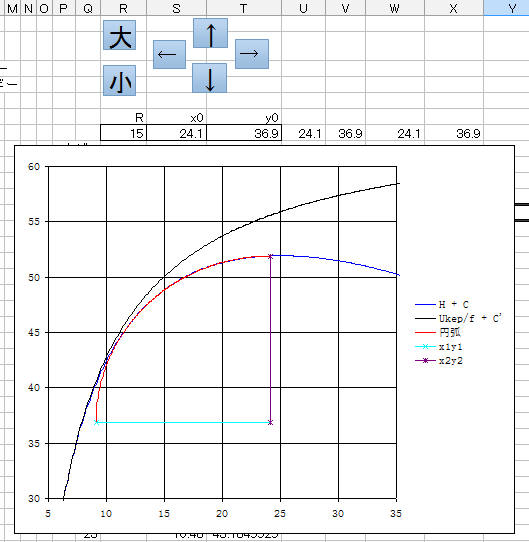
�X���[�v�̌`�����߂܂��悤�B�ʒu�G�l�� �M�[�̍��v��1/x�ɔ�Ⴕ���ʒu�G�l���M�[�ɂȂ�Ȃ���Ȃ�Ȃ��̂ŁA ���S����̋�����x �C���[���[�̒��S�ʒu�� ����Y(x) �Ƃ��Ă���C �� ���̂悤�ɕ\���܂��B�@
�����ŁC�萔�͎��̒ʂ�ł��B Eq.1����A���̂悤�Ɋ��i�萔���������j�������܂����B
����ɁA���̃J�[�u����v�[���[���a��艺���� ������X���[�v�̃J�[�u�ł��B
�~ �ʂȂ�A������[ ���[�ƃX���[�v�̑���ɁA��]�A�[�����ɂ���A�ȒP�Ɍy�ʂȍ\���Ŏ����ł��܂��B �@���}���쐻������]�A�[���ł��B�y�ʂȃo���T�ނƃJ�[�{���łł��Ă��܂��B�A�[���̐�[�ɘA�����Ǝ��S���� �ڑ����鎅���q���܂��B�݂莅�̒�������͂� �W���ȂǁA�萔��ς��A�x�Ȑ��̃G�N�Z���O���t��ŁA����Ƀt�B�b�g����~�ʂ����܂�����A���̉~�ʔ��a�ɍ��킹�ĉ�]�A�[���̒��������܂��B �@�}�ʂ̃A�[���̍����ɓ\�����v���X�`�b�N�́A�O���ł̓����Ɏ��s���ăA�[����90���ȏ�ɂȂ��ĘA�������o��Ńv�[���[���玅���O�� ��̂�h�~���邽�߂ł��B
�� ���ƕ]��
�� ��������ɂȂ������͕�����Ǝv���܂����A �������ԂɁA�ȉ~�O���͂������ɉ~�O���ɐ��ڂ��Ă��܂��܂��B ���a�����̌����Ȃ̂ŁA�v�[���[�Ȃǂ̉����̖��C���������Ǝv���܂��B ���̕��������P����A �^���̎����������邩���m��܂���B |